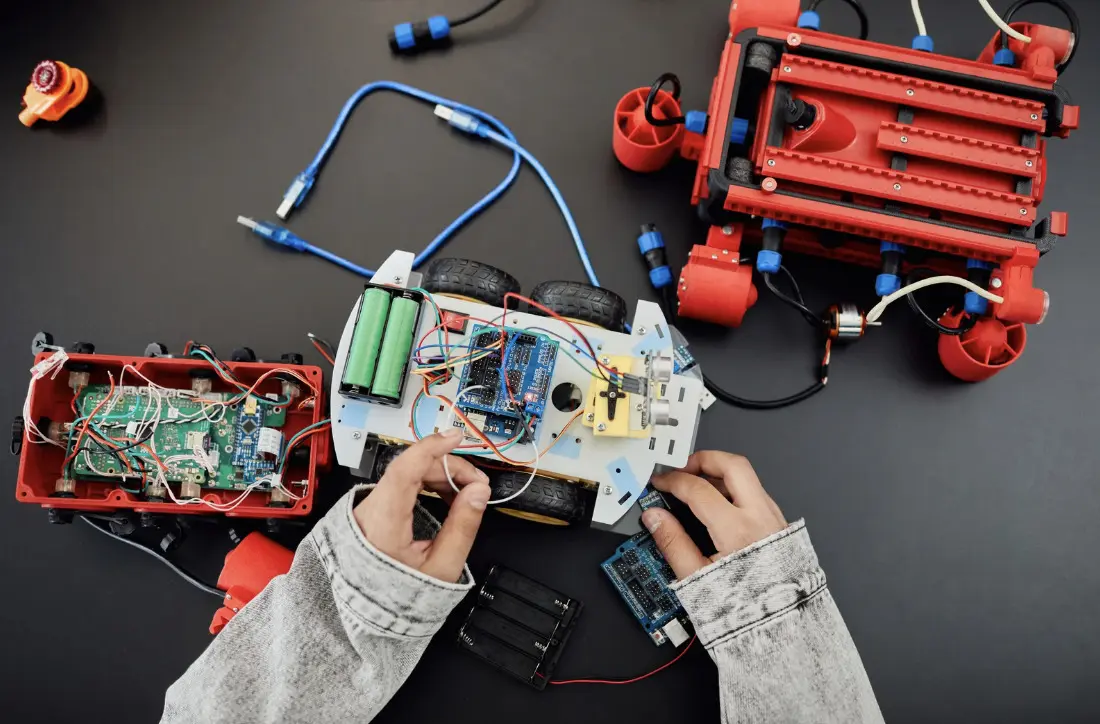
自律移動ロボットは、人間や他のロボットからの命令や操作なしに自己の意思で移動することができるロボットのことを言います。
これによって、自動化や効率化が可能になり、様々な用途に使用されています。移動には、自己位置決定技術や移動アルゴリズムを使用し、周囲の環境を検知するためにはGPS、IMU、LIDAR、カメラなどのセンサーを使用します。
本記事では、自律移動ロボットについて詳しく解説し、移動の仕組みやセンサーについて説明します。
Contents
自律移動ロボットの3つのタイプ
自律移動ロボットには、ランドロボット、空中ロボット、水中ロボットなど様々なタイプがあります
ランドロボットは陸地上を移動するロボットで、空中ロボットは空中を飛行するロボットで、水中ロボットは水中を移動するロボットです
自律移動ロボットの用途
自律移動ロボットは様々な用途に使われています
工業分野では生産ラインの自動化や物流の自動化に使われ、医療分野では手術のアシスタントや病院の清掃に使われ、軍事分野では戦闘や特殊任務に使われ、消費者向けには家庭用ロボットや自動運転車などがあります
自律移動ロボットの移動方法
自律移動ロボットは、自己位置決定技術と移動アルゴリズムを使用して移動します
それによって、ロボットが目的地に到達するために必要な経路を計画し、移動します
自律移動ロボットは自己位置決定で使用される技術
自律移動ロボットは、GPS、IMU、LIDAR、カメラなどのセンサーを使用して自己位置を決定します
これらのセンサーは、周囲の環境に関する情報を収集し、ロボットがどこにいるのかを把握します
障害物があっても目的地に到達できる移動計画
自律移動ロボットは、複数のセンサーから収集したデータを使用して、環境に応じた計画的な移動を行います
また、自律移動ロボットは、目的地に到達するために最適な経路を選択し、その経路を追跡しながら移動します
これによって、障害物や誘導のない環境でも目的地に到達することができます
自律移動ロボットに使用されているセンサーと環境把握能力
自律移動ロボットは、GPS、IMU、LIDAR、カメラ、距離センサー、地磁気センサーなど、様々なセンサーを使用します
これらのセンサーは、周囲の環境や障害物の検知、自己位置決定、対話などに使用されます
自律移動ロボットは、周囲の環境と相互作用するために、複数のセンサーを使用します
それによって、障害物の検知や経路計画、移動などを行います
また、自律移動ロボットは、人や動物などの周囲のライフサインを検知し、それに応じて移動や動作を調整することができます
自律移動ロボットの自己修復や自己診断
自律移動ロボットは、自己修復や自己診断を行うために、自己診断プログラムを搭載しています
これによって、ロボットが故障した場合に自己修復を行うことができます
また、自律移動ロボットは、センサーや移動部品などの故障を検知し、それを修正することができます
自律移動ロボットの安全性能
自律移動ロボットは、安全性能に優れていることが期待されています
それによって、人々や動物などの周囲に対して危険を与えないように設計されています
また、自律移動ロボットは、故障した場合に自己停止や自己修復を行うことができるため、安全性が高いと言えます
自律移動ロボットの期待される将来の展開
自律移動ロボットは、将来、さらに普及が進み、様々な用途に使用されることが期待されています
特に、自動運転車や家庭用ロボットなどの消費者向けアプリケーションは、将来的に大きく発展すると考えられています
また、工業分野や医療分野での使用も増えることが予想されます